

Ratio Overview
Systema cogendi ratio non cessandi pensandi praesertim munera applicationis negotiandi praebet ad stationes certas viae onerationis deprehensio. Maxime methodos cogendi modos non-contactus adhibet, fretus inspiciendis instrumentis ad deprehensionem et ponderationem onerariis vehiculis complendas. Systema notitias onerandas et notarum notitias per varias tabulas nuntius divulgare potest, et negotia processus digitally per programmatum viae fixi viae deprehensionis stationem deprehensionem administrat.
Typical propositum
Munus Descriptio
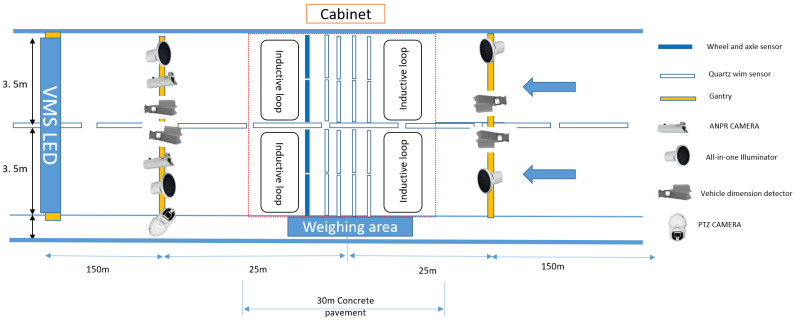
● Vehicula per viae principalis transeuntes, ratio pensionis pondus vehiculi totum pondus, axem pondus, numerum axium et summarum, axem distantiam, velocitatem vehiculi, et accelerationem vehiculi deprehendere potest.
● Systema accurate et efficaciter vehiculis separare et abnormes condiciones incessus tractare ut vehiculum queuing et venellam mutans, ad correspondentiam vehiculorum et notitiarum procurans.
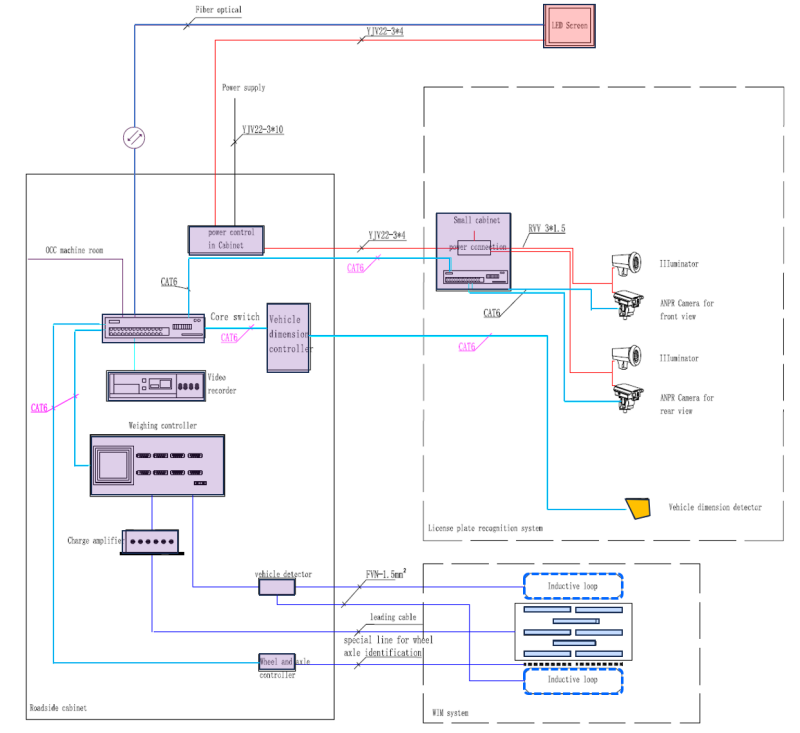
Systema munus automatice buffering habet, sinit eam certam copiarum notitiarum condere. Si notitia transmissio ad viae onerariae computatrum deficiat, systema notitias rescindere potest, ad singularitatem et integritatem praestandam.
● Perpendentes informationes ad retrahendum imperium computatrum per certa notitia interfaciei transmitti possunt.
Ratio diagnosis functionis sui culpae habet, et cum in aliquo instrumento vel linea defectu occurrit, ratio debitae culpae notitias consequi potest.
Ratio potest occurrere necessitatibus perpetuis, continuis, et omni operationis tempestatum sine modo.
● Vehicula enim semi-trailer repugnantibus lamminis ante et posticis licentia, systema addit posteriorem vehiculi apparatum capiendi et licentiam lamminis anterius et lamminam sequor.
Systema capere potest duas imagines panoramicas vehiculorum cumulatarum (including plenam conspectum vehiculi, licentiam lamminis, coloris, exemplar et notas geographicas eminentes).
Systema Components
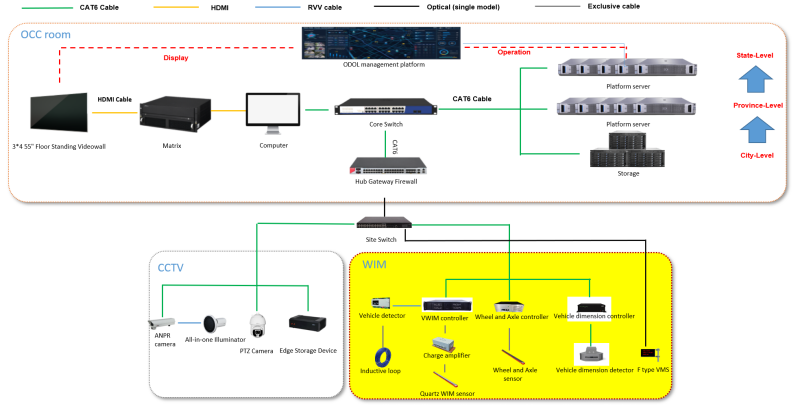
Systema cogendi non-cessare consistit in dynamica summus velocitatis appendens systema, vehiculum systematis separationis, ratio cognoscendi vehiculum, ratio custodiae viarum videndi, ratio emissio viarum informationum, et ratio integrationis viarum informationis transmissionis.
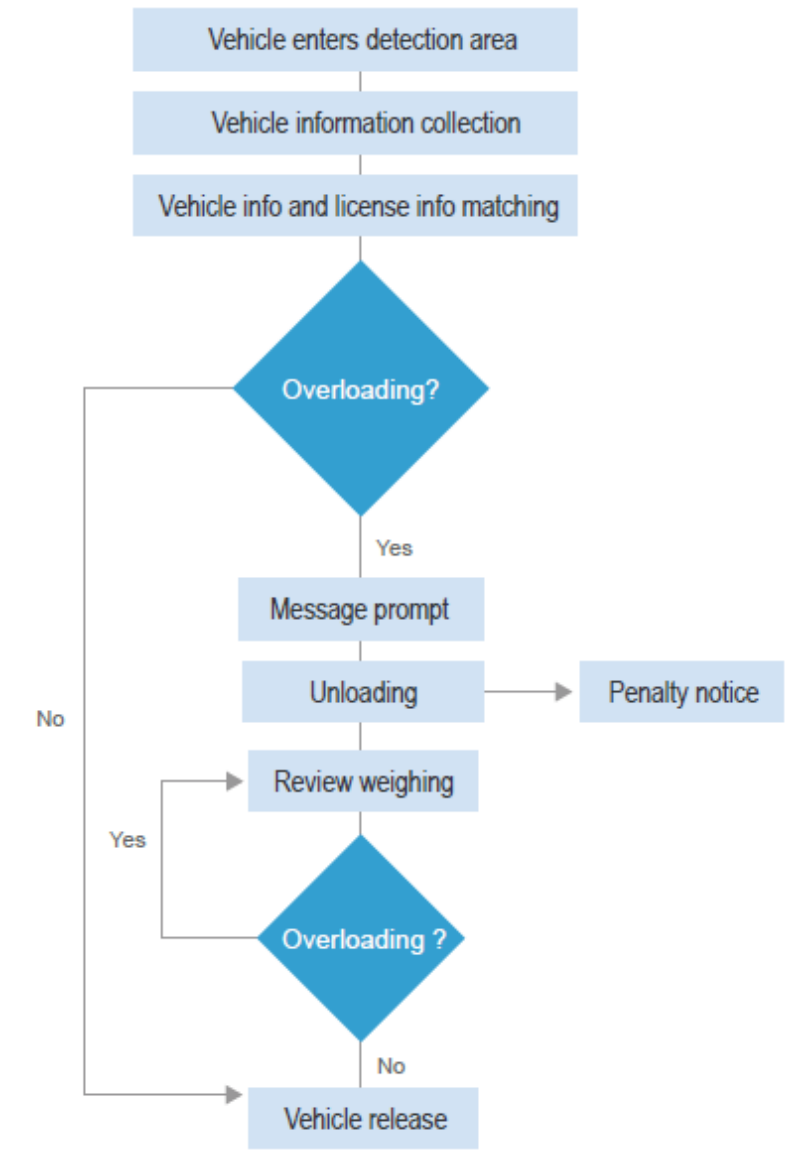
Non-subsisto perpendens Effectus Processus Diagram
Systema Acta Diagram
Pelagus Technical Indicatores
Maximum axem (vel coetus axem) onus: 40.000 kg
●Minimum axem (vel axem group) onus: 500 kg
Graduatio valorem: 50 kg
Dynamic deprehendatur celeritas range: 0.5-200 km/h
Dynamic pondus accurate gradu: Grade V
● Interdiu licentia laminam captis rate: ≥98%
●Nighttime licentia laminam captis rate: ≥95%
● License laminam agnitio et appendens notitia accurate matching: ≥99%

Enviko Technology Co.,Ltd
E-mail: info@enviko-tech.com
https://www.envikotech.com
Chengdu Officium: No. MMIV, Unitas 1, Aedificium 2, No. 158, Tianfu 4th Street, Hi-tech Zonam, Chengdu
Hong Kong Officium: 8F, Cheung Wang Aedificium, 251 San Wui Street, Hong Kong
Post tempus: Sep-13-2024




